728x90
Author: Joonhee Lim
Date: 2022/09/02
출처: https://blog.naver.com/jjz0426/221166929497
0. Motivation
저속에서의 차량 모델로 잘 알려져있는 Ackermann Model..
저속에서는 고속에서의 선회 상황과 달리 타이어에 작용하는 횡방향 힘을 무시할 수 있기 때문에 타이어 슬립을 고려하지 않는다. 그에 맞게 짜여진 수식을 한번 알아보자
1. Ackermann Kinematic Model
해당 모델은 기하학적으로 코너링 조향각을 도출해낸다.
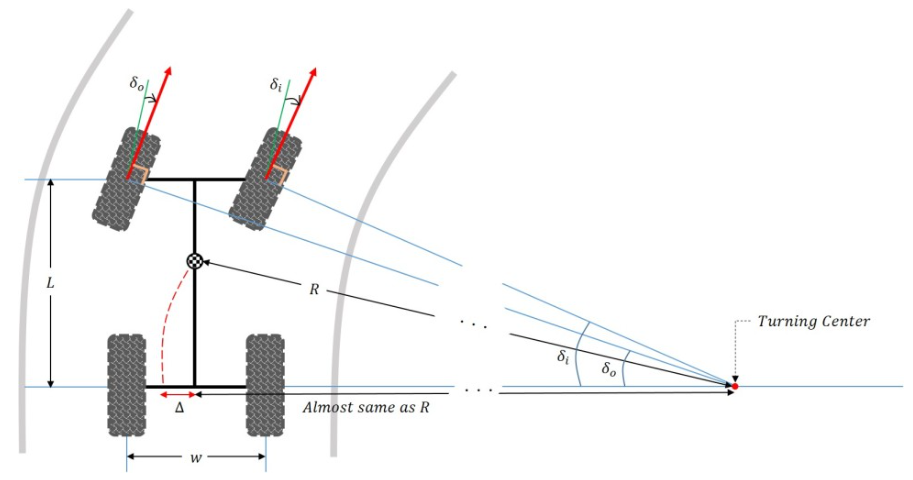
L: 차량 모델의 전륜 중심부와 후륜 중심부 사이 거리
R: 무게 중심과 선회 중심점 사이 거리
w: 구동축 길이
$\delta_o$: 외측 전륜 조향각
$\delta_i$: 내측 전륜 조향각
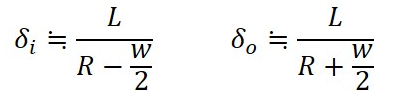
저속 선회 상황에서 $\delta$값은 다음과 같이 근사할 수 있다.
그 후 무게 중심점에서의 조향각을 $\delta$라 칭하고 이것이 내/외측 조향각의 평균이라고 한다면
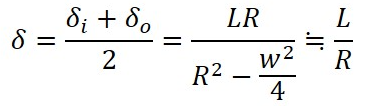
다음과 같이 도출된다.
반응형
'Autonomous Driving' 카테고리의 다른 글
| [AD] DWA(Dynamic Window Approach) vs TEB(Timed-Elastic-Band) 알고리즘 비교 (0) | 2022.09.07 |
|---|---|
| [AD] D*(Dynamic A*) 알고리즘 설명 (0) | 2022.09.03 |
| [AD] Bicycle Dynamic Model 설명 (0) | 2022.09.02 |
| [AD] Bicycle Kinematic Model 설명 (0) | 2022.09.02 |
| [AD] Stanley Tracking Algorithm 설명 (0) | 2022.09.01 |


